
Самый дешевый робот Scara Arm UnoScara 3D-печать робототехника для программирования Arduino
131.92





Новое поступление
Характеристики
*Текущая стоимость 7758.53 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Sep-18-2025 | 9232.19 руб. | 9694.54 руб. | 9463 руб. |
| Aug-18-2025 | 9154.82 руб. | 9612.90 руб. | 9383 руб. |
| Jul-18-2025 | 7680.57 руб. | 8064.14 руб. | 7872 руб. |
| Jun-18-2025 | 8999.77 руб. | 9449.71 руб. | 9224 руб. |
| May-18-2025 | 7836.51 руб. | 8228.42 руб. | 8032 руб. |
| Apr-18-2025 | 8844.70 руб. | 9286.46 руб. | 9065 руб. |
| Mar-18-2025 | 8767.49 руб. | 9205.15 руб. | 8986 руб. |
| Feb-18-2025 | 8689.42 руб. | 9123.92 руб. | 8906 руб. |
| Jan-18-2025 | 8611.41 руб. | 9042.44 руб. | 8826.5 руб. |
Описание товара






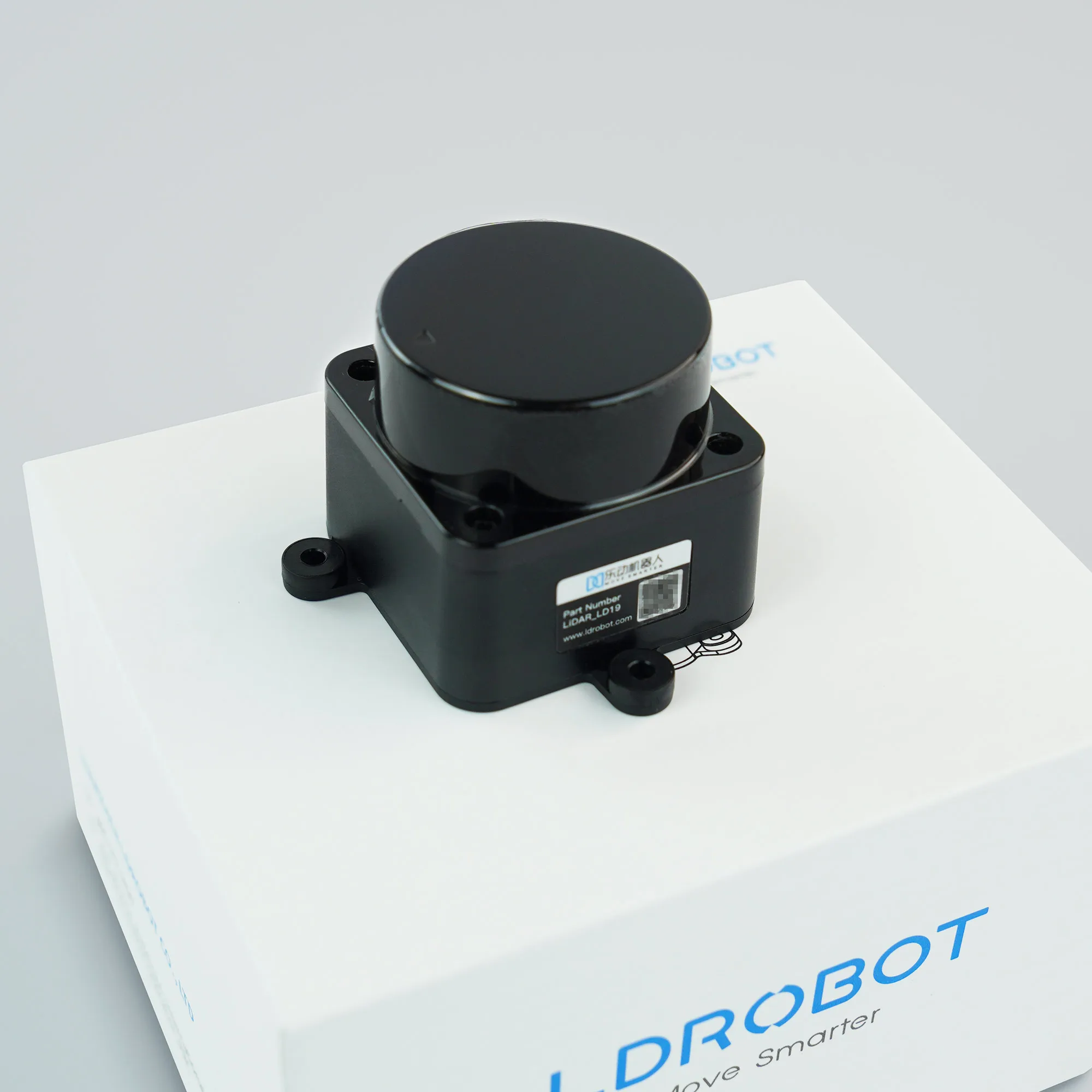
LD06 LD19 D300 Lidar Портативный 360 градусов DTOF лазерный сканер Kit-12M Поддержка диапазона ROS ROS2 RaspberryPi Jetson SLAM для Robot ROS
100% новый и высокое качество
Описание:
Он в основном состоит из лазерного ядра, блока беспроводной передачи, блока беспроводной связи, блока измерения угла, блока управления двигателем и механического корпуса. Ядро диапазона использует технологию DTOF для измерения 4500 раз в секунду. Когда он работает, lidar излучает инфракрасный лазер вперед, лазер отражается на единичном блоке приема фотонов после столкновения с целевым объектом. Таким образом, мы получаем как время лазерного излучения, так и получение, промежуток между ними-время полета. Со скоростью светильник, мы можем рассчитать расстояние. После получения данных о расстоянии, lidar объединит их со значением angel, полученным от единицы измерения угла, чтобы включить данные облака точек, а затем передаст данные облака точек на внешний интерфейс через беспроводную связь. Между тем внешний интерфейс обеспечивает ШИМ, чтобы позволить двигателю управлять двигателем. После того, как внешний блок управления получит скорость вращения, он достигнет указанной скорости через алгоритм PID с замкнутым циклом управления, чтобы обеспечить стабильную работу LD06.
Смотрите так же другие товары:





























